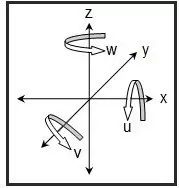
坐标系的作用是,在测量机行程的3D空间内定义零件位置和方向,它能具体的告诉测量机零件摆放在哪里(X/Y/Z的零点),是一个什么样的角度(I/J/K矢量)。而如果零件尚没有建立坐标系,那么它会拥有六个自由度:旋转的三个度(关于 X/Y/Z轴)和平移的三个度(关于X/Y/Z轴的零点); 如下图所示,该图表展示了3D空间的6个自由度(x,y,z,u,v和w)。
也就是说,是这六个自由度将零件固定住,而建立坐标系就是要确定六个自由度。在零件图纸中,第一、第二与第三基准定义能够固定六个自由度,也即建立坐标系。其中:
- 旋转的三个度由基准特征的I,J,K矢量组成
- 平移的三个度由基准特征的X,Y,Z位置组成
坐标系创建基本法则:找正、旋转、原点
1. 找正
约束旋转的两个度,使找正的轴匹配于选定特征的矢量。
要求:这是一个主要基准而且必须是具备矢量的3D特征。
典型特征:平面,圆柱,圆锥或者一个构造3D特征。
2. 旋转
约束旋转的一个度。以找正的轴为中心使旋转的轴匹配于选定特征的矢量。
要求:这是第二或者是第三基准,且必须是具备矢量2D或3D特征。
典型特征:平面,圆柱,圆锥或者一个构造的2D/3D特征,例如选择任何两个点类型特征来构造一条用于旋转的直线。
3. 原点
在X,Y,Z轴约束平移的三个度(原点)。
要求:按照第一,第二,第三基准的顺序或者根据图纸具体要求设置原点。
典型特征:任何特征。
坐标系建立小提示
- 先找正 ,然后旋转,接下来为X, Y, Z轴设置原点。永远不要在找正前旋转!
- 总是在测量2D特征(直线和圆)前找正。
- 总是在测量点(在X, Y, Z轴测量点)之前找正和旋转。
- 测量程序中保存的坐标系没有数量限制。
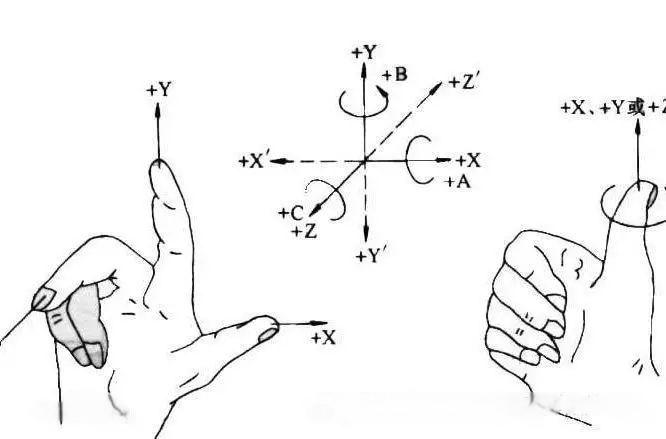
- 旋转的右手法则 - 右手大拇指指向围绕旋转轴的正方向(+X, +Y, 或+Z)。手自然卷曲的方向为围绕该轴的正旋转方向。负旋转方向为相反方向。